Joints driving task
|
|
Joints driving task |
This command defines the different joints driving tasks inserted in the scenario. Joints can be added in a task, a task is able to manage one or more tasks.
Creation stages / Use:
Click the icon or select Simulation > Joint Driving Task... from the drop-down menu.
Enter a new task name if required.
Select the joint to drive from the drop down list, and click Add joint button.
Enter the times and the values of desired movements by clicking in the relevant cells.
Select the type of interpolation:
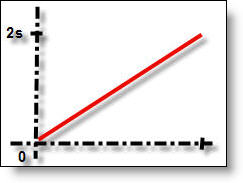
Constant velocity: The displacement movement is linear, the start and stop may be sudden. At each moment of the defined gap, the displacement value is strict. This interpolation is not realist. The acceleration is infinite when starting to have immediately the correct speed.
Constant acceleration: The acceleration is maximal, the velocity changes. It is often the case with small engines.
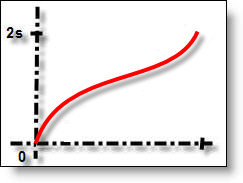
Variable acceleration: The movement is smoother at the start with a cushioned stop. It is often the case with big engines.
|
Constant velocity |
Constant acceleration |
Variable acceleration |
|
|
|
|
|
|
Each task is in relative time and can therefore start at 0 seconds. The time delay occurs at the scenario level. The benefit of this method is to be able to prepare driving sections and start them at the desired time. For example, the one-second movement of a part every 5 seconds on a conveyor in continuous operation. A first task will be the continuous movement of the conveyor, the 2nd task will be the movement of the part from 0 to 1 second. The start of the 2nd task will occur at 5 seconds in the scenario. |
|
|
Only some joints can be driven. Non driven joints do not appear in the drop-down list. Driven joints are:
|