Equidistance joint
|
|
Equidistance joint |
This command allows to link together three rigid groups by making sure that the distance between a point attached to the first rigid group and a point attached to the second rigid group remains the same as the distance between the point attached to the first rigid group and a point attached to the third rigid group.
Creation stages / Use:
Click the  icon or select the Mechanism > Other Joints > Equidistance... command from the drop-down menu.
icon or select the Mechanism > Other Joints > Equidistance... command from the drop-down menu.
Select the center rigid group.
Select the second rigid group.
Select the third rigid group.
Select the center point (link with the center rigid group).
Select the second point (link with the second rigid group).
Select the third point (link with the third rigid group).
|
|
It is necessary to use an equidistant joint per pair of rigid groups to move symmetrically (i.e. one for a symmetrical vise and two for a three-jaw chuck). |
|
|
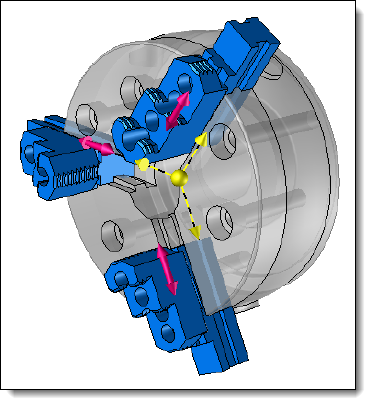
The selected points can't be the same or combined. (neither during the selection nor during their movement). in the case of a three-jaw chuck, it is recommended to select a point on the outside edge of the jaw. |
|
Example of equidistant joints (in yellow). |
|
|